作者在这里要介绍一种点集的分割算法(源自作者读《图像局部不变性特征与描述》时的一点灵感)。其起源来自于Kd树算法,但比Kd树算法更具有一般性。有关Kd树算法,会在文章开头做个简单介绍,并指出其中的起源点和关键点。
Kd树算法
在图形特征点匹配算法中,Kd树是一种常用的特征匹配算子。Kd树是英文K-dimension tree的缩写,是对数据点在\(k\)维空间中划分的一种数据结构。这里先以一个简单直观的示例来介绍Kd树算法,并找出其中的起源点和关键点。
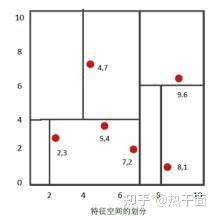
假设有6个二维数据点:\( \{ (2,3),(5,4),(9,6),(4,7),(8,1),(7,2)\} \) 。数据点位于二维空间内,如图1所示。为了能有效地找到最近邻,Kd树采用分而治之的思想,即将空间划分成几个小部分。首先粗直线将空间一分为二,然后在两个子空间中,细直线又将整个空间划分为四个部分,最后虚直线将这四部分进一步划分。
Kd树构建的关键点就在于区间划分的标准:统计数据点在每个维度上的数据方差。挑选出方差中的最大值,对应的维就是分割域的值。还是以上面的实际例子为例:数据点是平面数据点,因此有两个维度。可以分别统计这些数据点在\(x\)轴和\(y\)轴上的数据方差。如果\(x\)轴方差较大,那么就以垂直于\(x\)轴方向划一条竖直线将空间一分为二;如果\(y\)轴方差较大,那么就以垂直于 \(y\)轴方向划一条水平线将空间一分为二。
Kd树中的两个维度是确定为\(x\)轴和\(y\)轴。从纯数学角度来看,这个平面点集的方差最大值未必就在\(x\)轴或\(y\)轴上。以此思路为核心进一步扩展:对于任一的多维度点集,求一条多维度直线,使得这些多维度点在这条直线上的投影点方差达到最大值。那么分割域的分割平面,就是垂直于该直线的平面。这条直线和这个平面是否存在且唯一在呢?
投影方差分割
按照不同维度可以逐步推导出投影方差的数学含义。
AlgMain : 一维投影方差分割
AlgMain : 二维投影方差分割
AlgMain : 三维投影方差分割
AlgMain : 多维投影方差分割
形象一点的解释就是:用一个“紧凑”的椭球(或者椭圆)去容纳(或覆盖)这些点,那么这个椭球(或椭圆)的最长轴所指方向就是使得距离方差达到最大值的方向,垂直于该方向且过椭球(或椭圆)中心的平面(或直线)就是分割平面(或直线)。
投影方差分割的特点
方差分割具有以下几个典型特点:
- 平移不变性
- 旋转不变性
- 缩放不变性
对点集的平移、旋转和缩放,不影响方差分割方法。只有当点集的分布有明显变化时,方差分割才会发生改变。
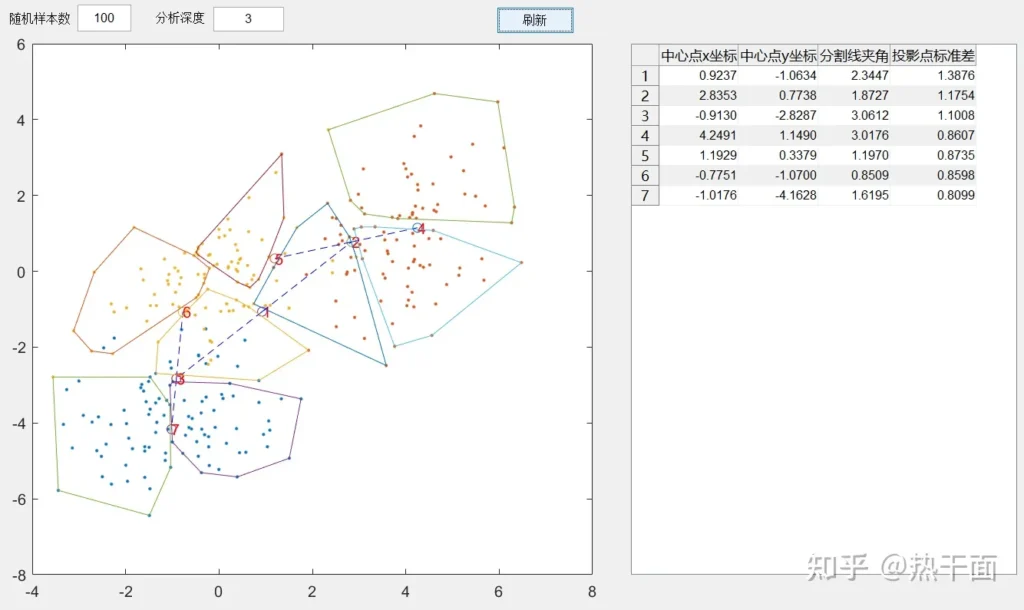
投影方差分割的例子
下面给出几个方差分割的例子(基于Matlab):
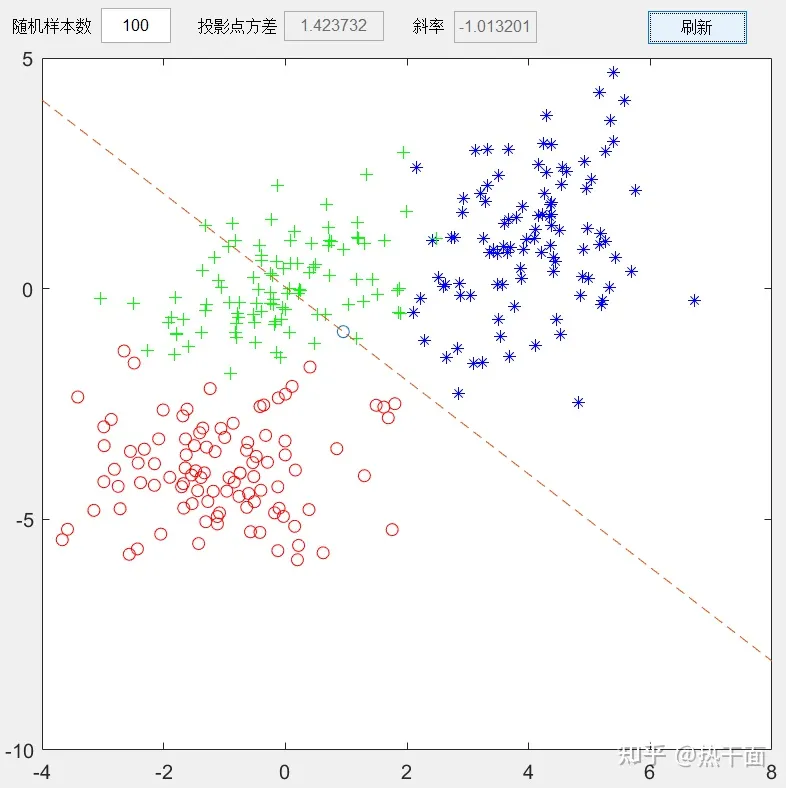
方差分割可以连续多次使用。将原有已分割平面进行进一步细分。每多进行一次分割,方差就会进一步缩减。另外,这种连续的方差分割,最后一定是凸分割。
这个证明思路其实也很简单:假设分割区域存在凹陷部分,那么必然就有突出点伸入到凹陷部分。由于封闭区域内距离方差小于一定值,这些突出点之前就应当在之前被分配原封闭区域内。这就与算法的基本要求相矛盾。具体的证明留给读者思考。
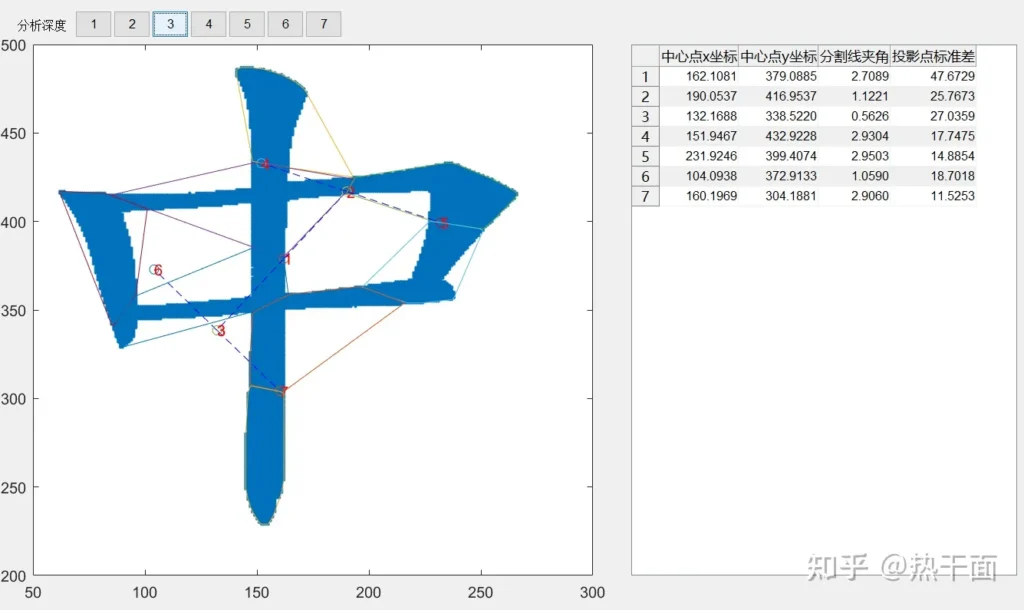
方差分割的结果某种意义上,可以形成一个图形的“特征值”。旋转,平移,缩放或者少量的增减,不会对这个“特征值”造成太大影响。
更加有意思的是:作者在阅读《数字图像处理的MATLAB实现(第二版)》时,发现在章节6.6—直接在RGB矢量空间中处理,其中的公式和二维分割算法几乎一样。有兴趣的读者可以查阅一下。
参考代码(Matlab)
function [xMean,yMean,beta,deviation] = MinVarianceSplit(xValues,yValues)
%预处理检测
count = length(xValues);
if count <= 0
fprintf('输入的数组没有元素!\n');
return;
end
if count ~= length(yValues)
fprintf('输入的X,Y数组长度不一致!\n');
return;
end
%求X,Y平均值
xMean = mean(xValues);
yMean = mean(yValues);
%平移所有点至中心点位置
xNewValues = xValues - xMean;
yNewValues = yValues - yMean;
%计算几个常用数值
xyNewValue = xNewValues * yNewValues';
xxNewValue = xNewValues * xNewValues';
yyNewValue = yNewValues * yNewValues';
%计算beta角度
beta = atan(2 * xyNewValue / (xxNewValue - yyNewValue)) / 2;
%计算二阶导数判别式
delta = - 2 * (xyNewValue * sin(2 * beta) + (xxNewValue - yyNewValue) * cos(2 * beta));
%检查判别式
if delta < 0
%二阶导数小于零,说明是极大值
%另外一个垂直方向就是极小值方向
beta = beta + pi / 2.0;
end
%检查计算结果
%调整输出方向在(0,pi)区间内
if beta < 0
beta = beta + pi;
elseif beta > pi
beta = beta - pi;
end
%计算投影点之间的方差数值
deviation = sqrt((cos(2 * beta) * (xxNewValue - yyNewValue) + 2 * sin(2 * beta) * xyNewValue + (xxNewValue + yyNewValue)) / (2 * count));
end